
The project focused on the development of the intelligent façade mimicking natural systems of living organisms and their real-time abilities to adjust to environmental conditions.
The project was developed by Ernessa Francois, Olivia Szymkowski, and Natalia Wilk, NJIT’19 for the Adaptive and Autonomous Environments Options Studio III, advised by professor Andrzej Zarzycki, NJIT.
Utilizing concepts of soft robotics—flexible skins and pneumatic actuators—as an emergent approach to building façade design, this adaptive skin combines performance-based and visually engaging qualities. Soft robotics actuators control sunlight/shading, enable natural ventilation, and regulate temperature within the double-skin building façade. Silicon-based soft actuators integrate a number of composite materials, including thermochromic dye and magnetic iron powder, which provide unique physical properties to the adaptive façade assembly.

Facade pneumatic actuator. Imagery by: Ernessa Francois, Olivia Szymkowski, and Natalia Wilk
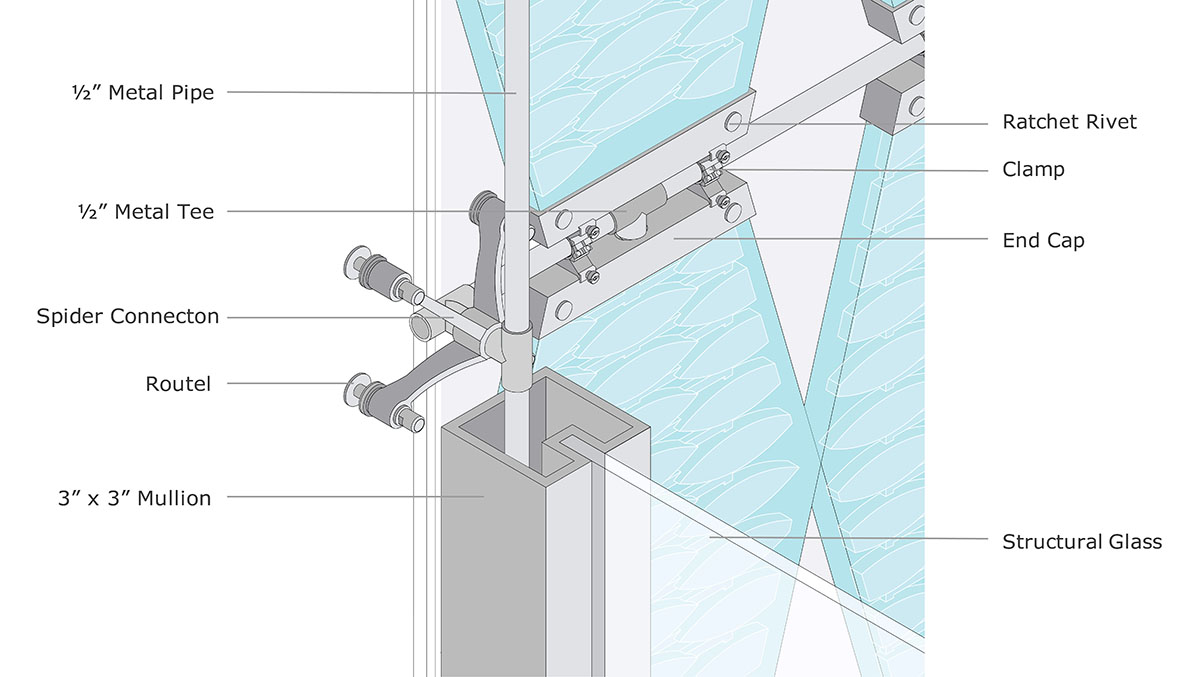
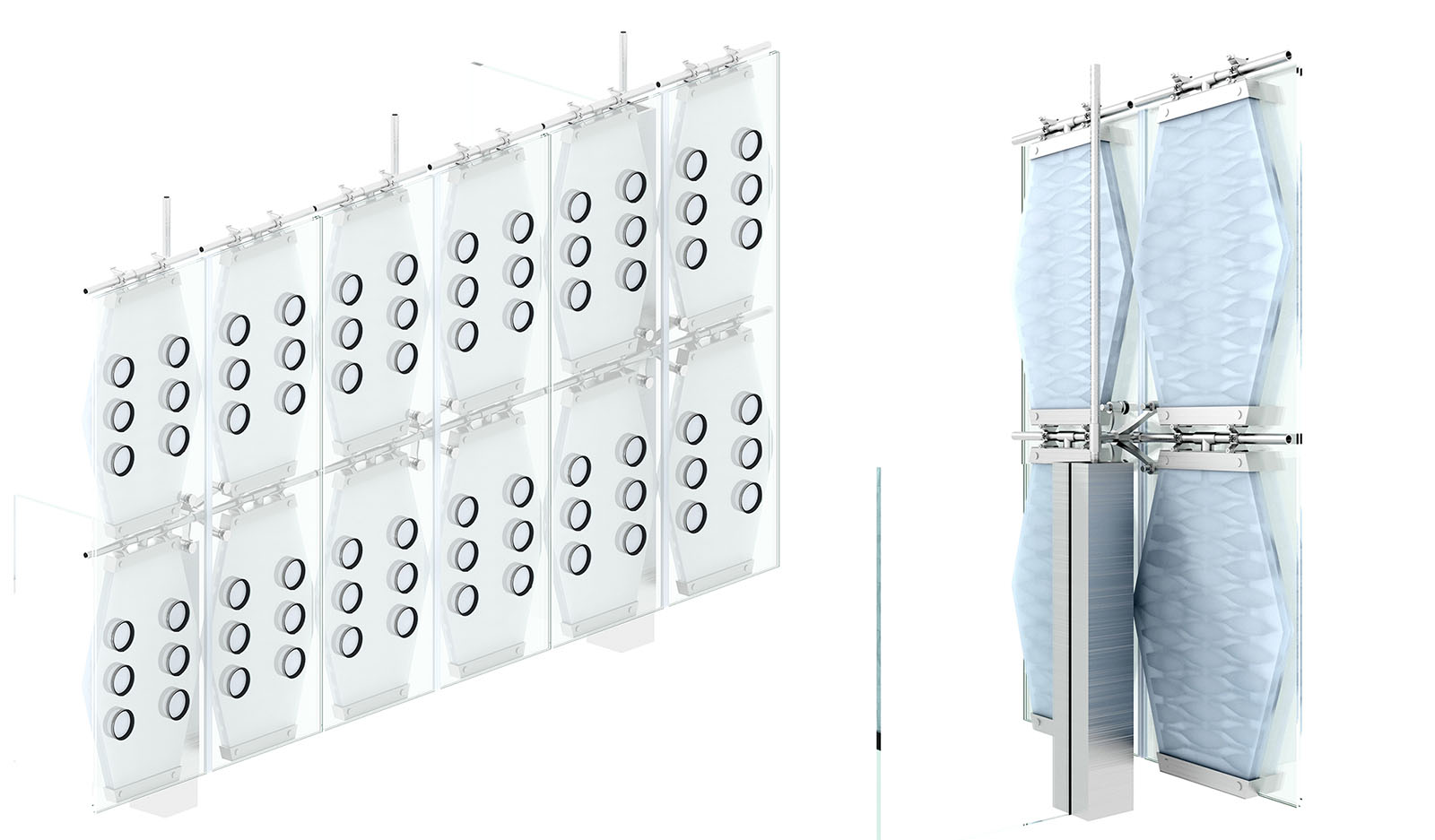
Pneumatic assembly. Imagery by: Ernessa Francois, Olivia Szymkowski, and Natalia Wilk
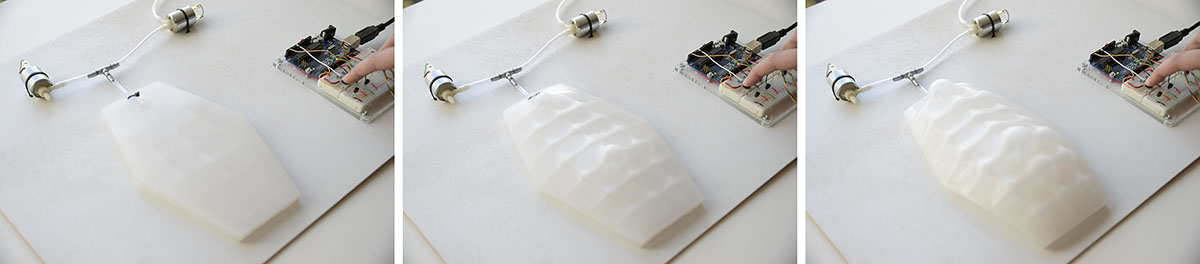
Preliminary testing of pneumatic assembly
Thermochromic dye enables material color and level-of-transparency changes based on the ambient temperature, while magnetized silicon helps to seal soft actuators with the curtain wall glass to control air movement in and out of the double-skin cavity. The combination of both exemplifies an emerging approach to active façades, which takes advantage of a number of electronic (embedded), pneumatic, and material technologies to develop a comprehensive and performative façade design.
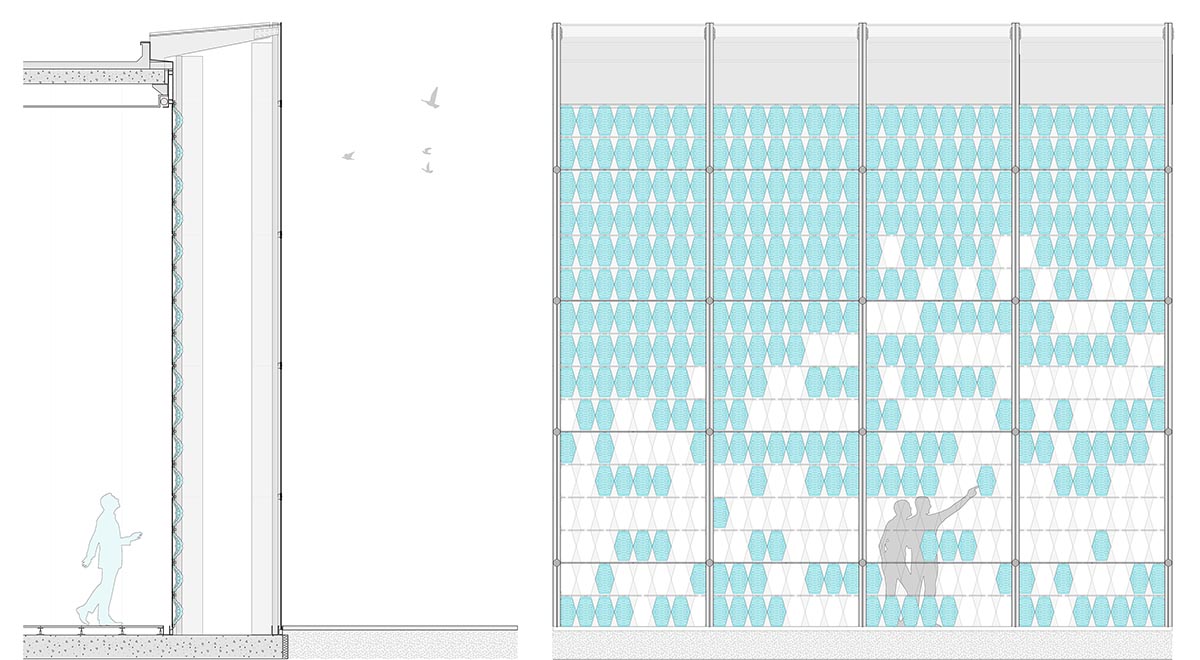
Facade pattern layout–actuator placements. Imagery by: Ernessa Francois, Olivia Szymkowski, and Natalia Wilk
The project also aimed to balance both performance and aesthetic aspirations. Technology was treated as a visually explicit and active element that expresses its thermal states and brings user awareness to building systems. Particular emphasis was placed on the way soft components were actuated—the patterns of actuation and magnitude—to eliminate robot-like, mechanical actions. Soft building components closely controlled with sensors and microcontrollers provided a harmonic and natural response to normally mechanically activated building control systems.
The Making of Pneumatic Actuators
The process involved 3D printing a range of silicon molds, combining silicon with thermochromic and black iron oxide (Fe3O4) powder to embed desired material properties.
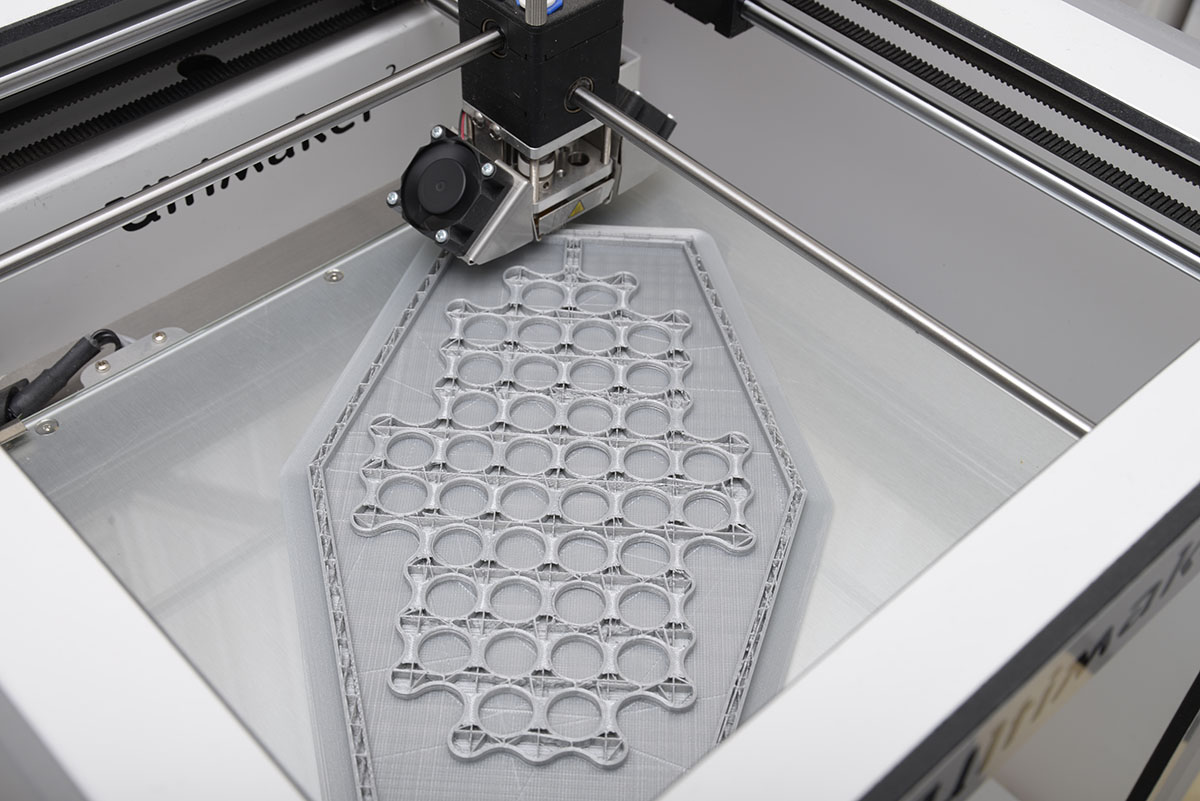
3D printing of the actuator molds.
Casting Process Diagram
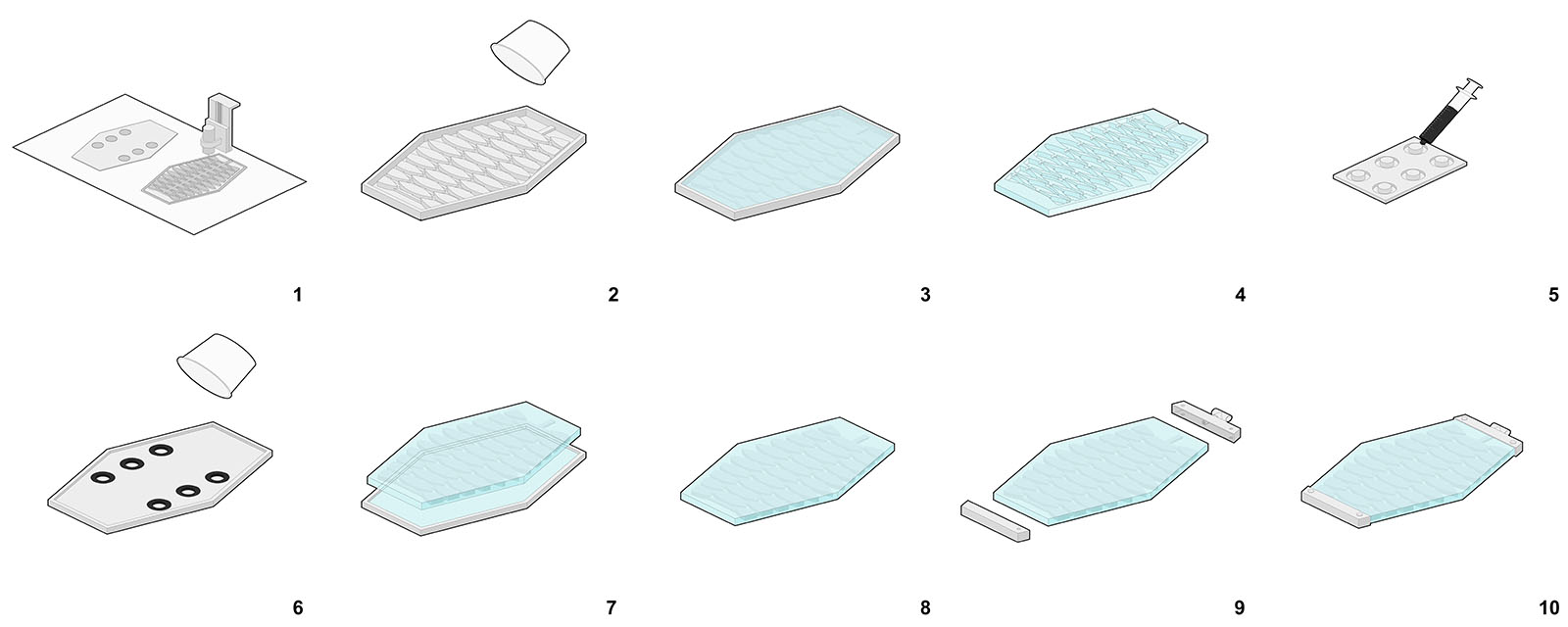
Soft actuator steps
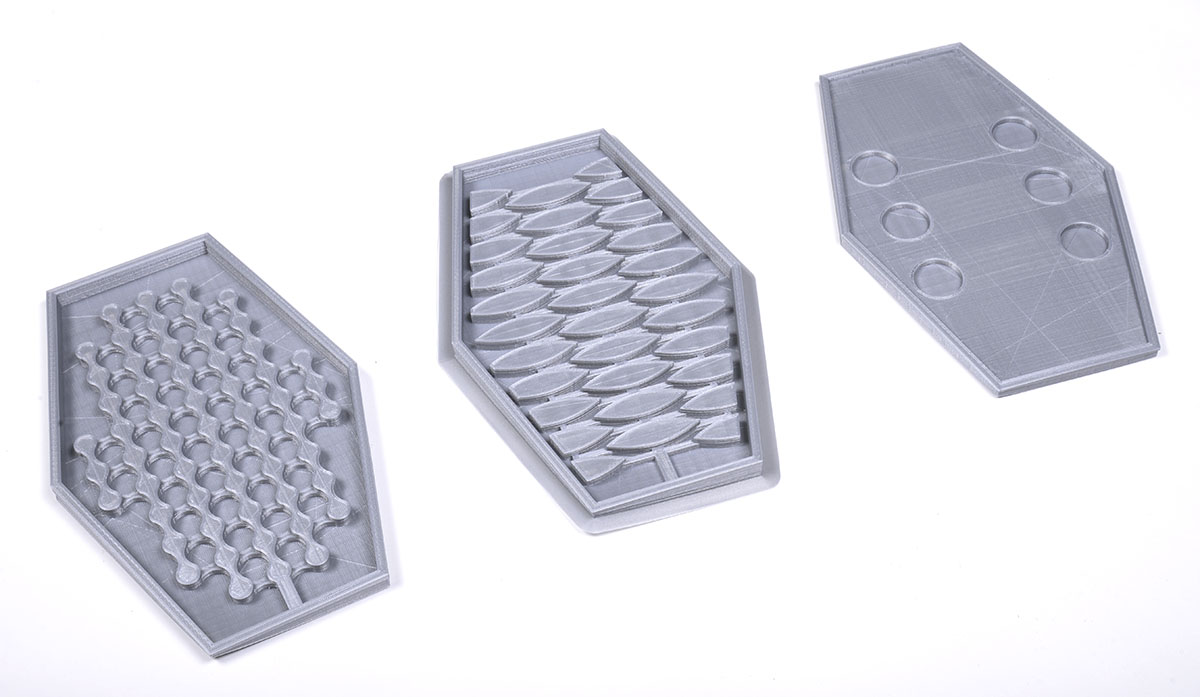
3D printed molds used for silicon casting of soft actuators.

Behind the camera view of the prototyping space for soft actuator project. From a design to maker and hacker creative space.
Progress Models

Physical Prototypes: progress models of the facade assemblies (version 1).

Integration of thermochromic compound (version 2).